Co-Optimizing Safety and Performance for Autonomous Systems
Abstract
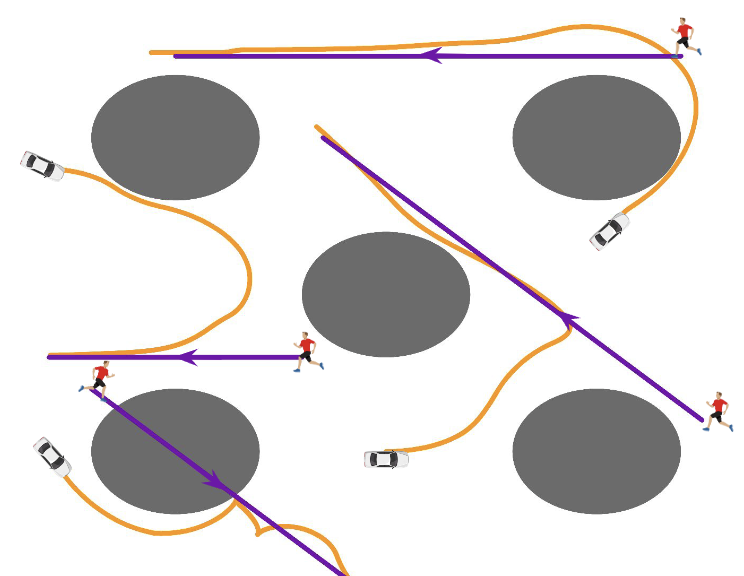
As autonomous systems become more ubiquitous in daily life, ensuring high performance with guaranteed safety is crucial. However, safety and performance could be competing objectives, which makes their co-optimization difficult. Learning-based methods, such as Constrained Reinforcement Learning (CRL), achieve strong performance but lack formal safety guarantees due to safety being enforced as soft constraints, limiting their use in safety-critical settings. Conversely, formal methods such as Hamilton-Jacobi (HJ) Reachability Analysis and Control Barrier Functions (CBFs) provide rigorous safety assurances but often neglect performance, resulting in overly conservative controllers. To bridge this gap, we formulate the co-optimization of safety and performance as a state-constrained optimal control problem, where performance objectives are encoded via a cost function and safety requirements are imposed as state constraints. We demonstrate that the resultant value function satisfies a Hamilton-Jacobi-Bellman (HJB) equation, which we approximate efficiently using a novel physics-informed machine learning framework. In addition, we introduce a conformal prediction-based verification strategy to quantify the learning errors, recovering a high-confidence safety value function, along with a probabilistic error bound on performance degradation. Through several case studies, we demonstrate the efficacy of the proposed framework in enabling scalable learning of safe and performant controllers for complex, high-dimensional autonomous systems.
Related Papers
|
2025 July |
42nd International Conference on Machine Learning (ICML) 2025, Vancouver, Canada |
|
2026 January |
AAAI Workshop on Multi-Agent Path Planning |
|
2026 April |
Pre-print |
People

Manan Tayal


Shishir Kolathaya
