News
-
May 12, 2026
Our recent work titled “A Co-Design Framework for High-Performance Jumping of a Five-Bar Monoped with Actuator Optimization” has been accepted to IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 2026, Italy!!
-
March 27, 2026
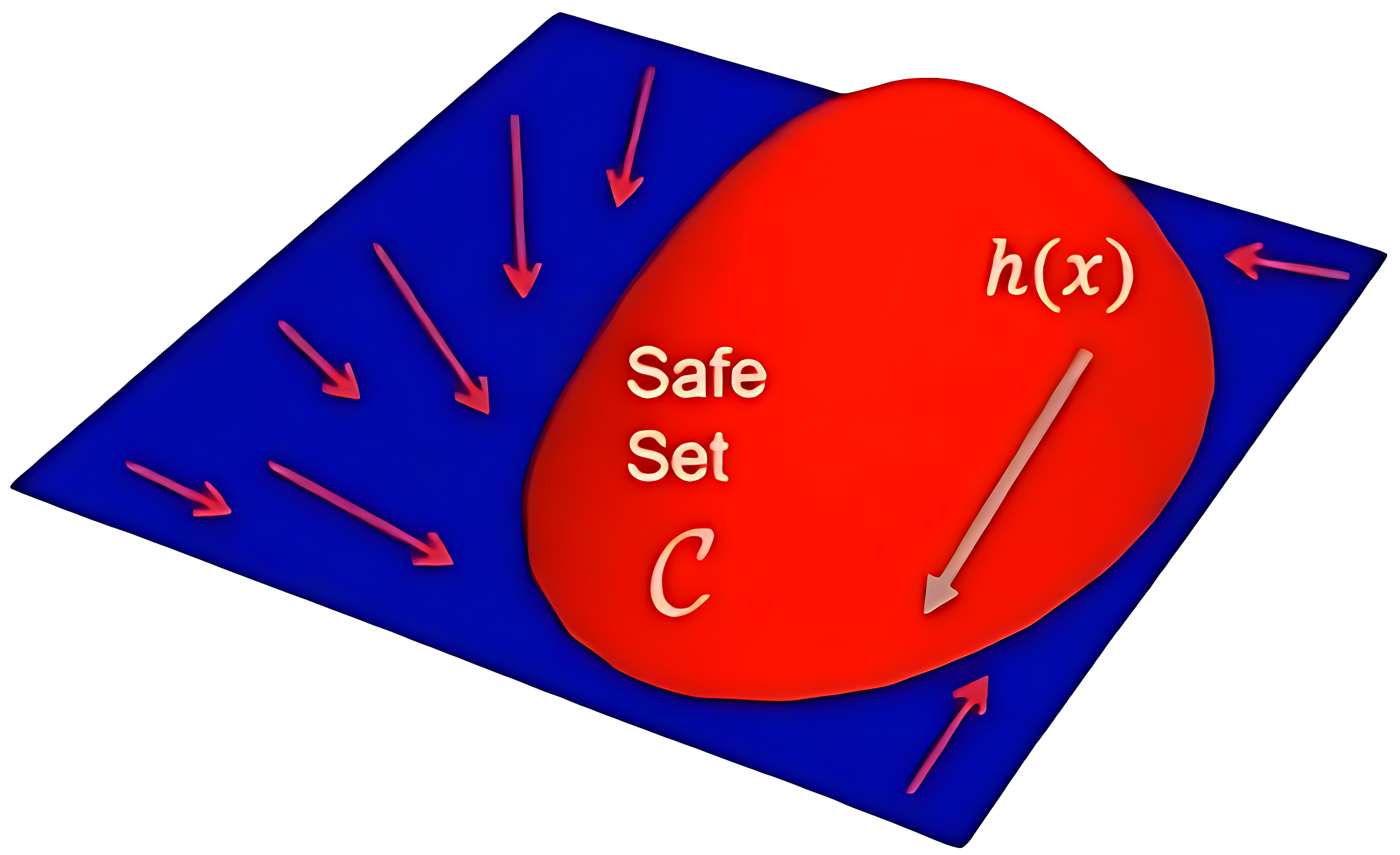
Our recent work titled “V-OCBF: Learning Safety Filters from Offline Data via Value-Guided Offline Control Barrier Functions” has been accepted to Transactions on Machine Learning Research (TMLR)!!
-
January 31, 2026
Our recent work titled “COMPAct: Computational Optimization and Automated Modular design of Planetary Actuators” has been accepted to IEEE International Conference on Robotics and Automation (ICRA) 2026, Vienna, Austria !!
-
January 20, 2026
Our recent work titled “A Collision Cone Approach for Control Barrier Functions” has been accepted to Transactions on Control System Technology (TCST)!!
Active Research
.png)
PEPC: Data-Driven Physics Embedded Dynamics with Predictive Control and Reinforcement Learning for Quadrupeds
Lagrangian Neural Networks (LNN) for quadrupedal robot locomotion.



MULE: Multi-terrain and Unknown Load Adaptation for Effective Quadrupedal Locomotion
A learning based framework for load adaptive quadrupedal robot locomotion on mutiple terrains.





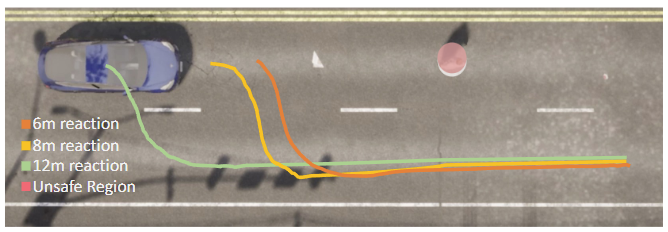
Co-Optimizing Safety and Performance for Autonomous Systems
A physics informed machine learning framework for safe & optimal control of Autonomous Systems using Conformal Prediction.



PIP-Loco: A Proprioceptive Infinite Horizon Planning Framework for Quadrupedal Robot Locomotion
A framework to achieve proprioceptive quadrupedal robot locomotion by combing MPC & RL.

Formally verified Neural CBF in stochastic environment
Neural Network Based CBF with completeness guarantees


People
Faculty
Shishir Kolathaya
Assistant Professor, CSA & CPS, IISc
Collaborators

Aaron Ames
Bren Professor, ME & CDS, Caltech
Somil Bansal
Assistant Professor, AA, Stanford

Ayonga Hereid
Assistant Professor, ME & AE, OSU
Andrew Clark
Associate Professor, ESE, WUSTL
Pushpak Jagtap
Assistant Professor, CPS, IISc

Majid Khadiv
Assistant Professor, CIT, TUM

Debasish Ghose
Professor, AE & CPS, IISc

Bharadwaj Amrutur
Professor, ECE & CPS, IISc

Shalabh Bhatnagar
Professor, CSA, IISc

Jishnu Keshavan
Assistant Professor, ME, IISc

Ashish Joglekar
Visting Faculty, CPS, IISc. Co-founder, Twara Robotics

Ashitava Ghosal
Prof. Satish Dhavan Chair Professor, ME, IISc (Retd.)
PhD Students
Vamshi Kumar Kurva
Learning Based Adaptive Control
Manan Tayal
Safe Robot Learning and Control
Aman Singh
Design and Control Co-Optimization
Aditya Shirwatkar
Contact Rich Legged Locomotion
Aastha Mishra
Design and Control Co-Optimization
Prakrut Kotecha
Learning based controls of Legged Robots

Sudesh Morey
Neuromorphic Event Cameras







