Stoch 1
Design & Development of Stoch 1
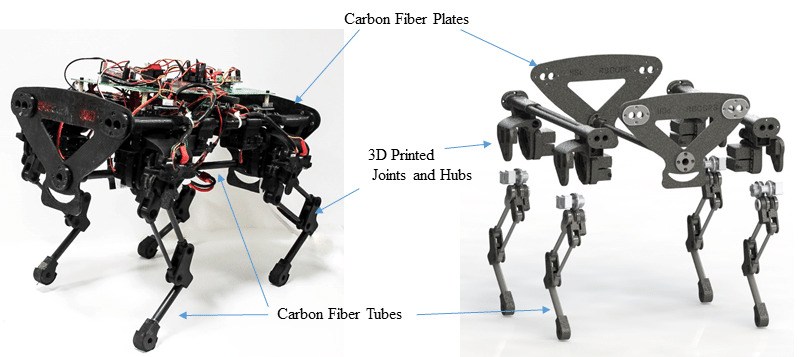
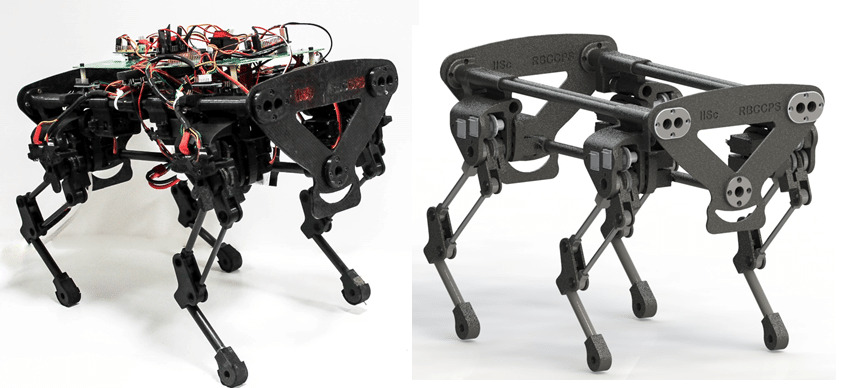
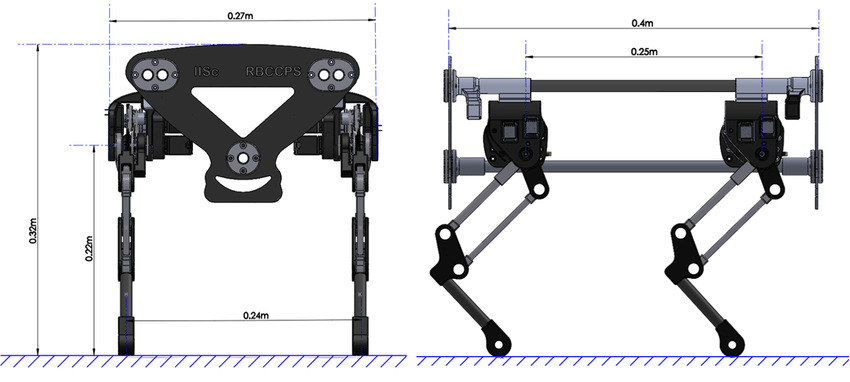
In this paper, we present a complete description of the hardware design and control architecture of our custom built quadruped robot, called the Stoch. Our goal is to realize a robust, modular, and a reliable quadrupedal platform, using which various locomotion behaviors are explored. This platform enables us to explore different research problems in legged locomotion, which use both traditional and learning based techniques. We discuss the merits and limitations of the platform in terms of exploitation of available behaviours, fast rapid prototyping, reproduction and repair. Towards the end, we will demonstrate trotting, bounding behaviors, and preliminary results in turning. In addition, we will also show various gait transitions i.e., trot-to-turn and trot-to-bound behaviors.
Realizing Learned Locomotion Behaviors through Kinematic Motion Primitives
Our main objective in next paper is two fold 1) Obtain an effective tool to realize these basic motion patterns for quadrupedal walking, called the kinematic motion primitives (kMPs), via trajectories learned from deep reinforcement learning (D-RL) and 2) Realize a set of behaviors, namely trot, walk, gallop and bound from these kinematic motion primitives in our custom four legged robot, called the “Stoch”. D-RL is a data driven approach, which has been shown to be very effective for realizing all kinds of robust locomotion behaviors, both in simulation and in experiment. On the other hand, kMPs are known to capture the underlying structure of walking and yield a set of derived behaviors. We first generate walking gaits from D-RL, which uses policy gradient based approaches. We then analyze the resulting walking by using principal component analysis. We observe that the kMPs extracted from PCA followed a similar pattern irrespective of the type of gaits generated. Leveraging on this underlying structure, we then realize walking in Stoch by a straightforward reconstruction of joint trajectories from kMPs. This type of methodology improves the transferability of these gaits to real hardware, lowers the computational overhead on-board, and also avoids multiple training iterations by generating a set of derived behaviors from a single learned gait


Citation
@inproceedings{dholakiya2019design,
title={Design, development and experimental realization of a quadrupedal research platform: Stoch},
author={Dholakiya, Dhaivat and Bhattacharya, Shounak and Gunalan, Ajay and Singla, Abhik and Bhatnagar, Shalabh and Amrutur, Bharadwaj and Ghosal, Ashitava and Kolathaya, Shishir},
booktitle={2019 5th International Conference on Control, Automation and Robotics (ICCAR)},
pages={229--234},
year={2019},
organization={IEEE}
}
@inproceedings{singla2019realizing,
title={Realizing learned quadruped locomotion behaviors through kinematic motion primitives},
author={Singla, Abhik and Bhattacharya, Shounak and Dholakiya, Dhaivat and Bhatnagar, Shalabh and Ghosal, Ashitava and Amrutur, Bharadwaj and Kolathaya, Shishir},
booktitle={2019 International Conference on Robotics and Automation (ICRA)},
pages={7434--7440},
year={2019},
organization={IEEE}
}
Related Papers
|
2019 April |
IEEE International Conference on Control, Automation and Robotics (ICCAR) 2019 Beijing, China. |
|
2019 May |
IEEE International Conference on Robotics and Automation (ICRA) 2019 Montreal, Canada. |
People

Shalabh Bhatnagar

Bharadwaj Amrutur

Ashitava Ghosal
